Computer Vision and Artificial Intelligence for Autonomous Cars
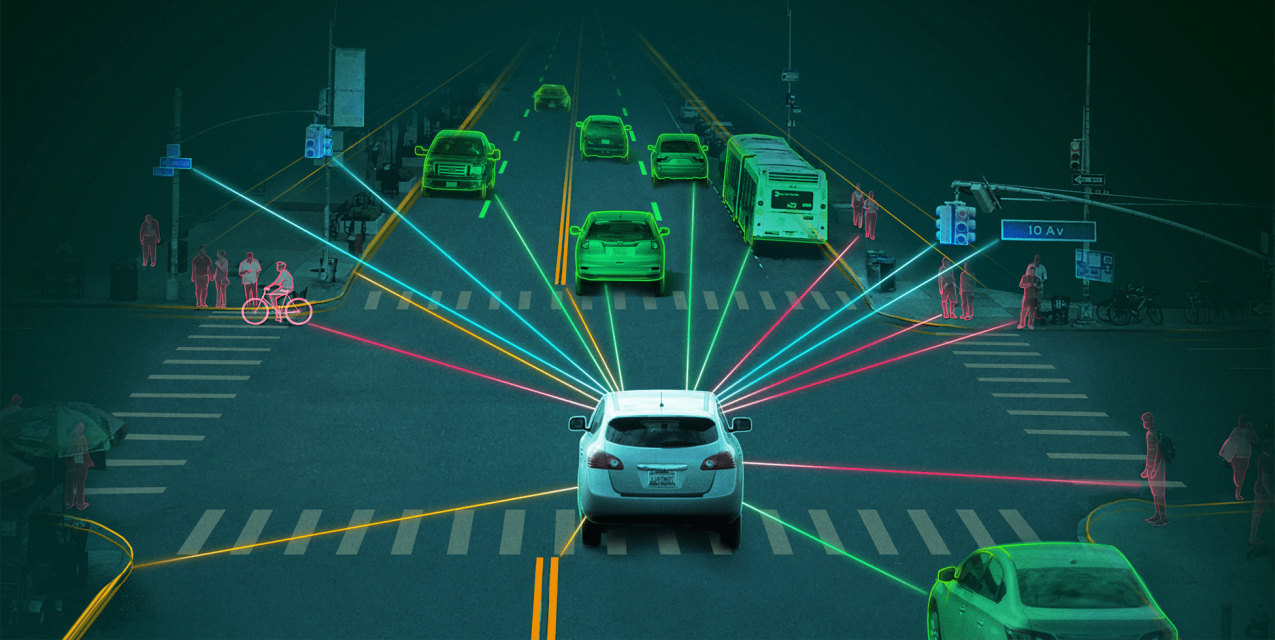
This course introduces the core computer vision techniques and algorithms that autonomous cars use to perceive the semantics and geometry
of their driving environment, localize themselves in it, and predict its dynamic evolution. Emphasis is placed on techniques tailored for real-world settings,
such as multi-modal fusion, domain-adaptive and outlier-aware architectures, and multi-agent methods.
Deep Learning for Autonomous Driving
Autonomous driving has moved from the realm of science fiction to a very real possibility during the past twenty years,
largely due to rapid developments of deep learning approaches, automotive sensors, and microprocessor capacity.
This course covers the core techniques required for building a self-driving car, especially the practical use of deep learning through this theme.

Spring 2022
6 ECTS. Taught in by Dengxin Dai,
by Dengxin Dai, Alex Liniger, Christos Sakaridis,
Martin Hahner, and Jan-Nico Zaech.
Class size limited to 80 students.